조선대-존스홉킨스대, 자율형 생체모방 유연 추진체 협력 메커니즘 규명
2025-09-03 10:47
add remove print link
JCR 상위 6% 권위 학술지 게재
수중 로봇용 차세대 추진 원천기술로 확장 기대
[위키트리 광주전남취재본부 노해섭 기자] 조선대학교(총장 김춘성) 기계공학과 정영달 교수(책임연구자)와 존스홉킨스대학교 채석봉 박사후연구원(제1저자)이 참여한 국제 공동연구팀이, 물고기 지느러미처럼 휘어지는 인공 장치(유연 추진체)가 두 개 이상 함께 움직일 때 더 효율적으로 앞으로 나아갈 수 있다는 메커니즘을 규명했다.
이번 연구 성과는 유체역학 분야 JCR 상위 6% 권위 학술지인 『Physics of Fluids』 2025년 8월호에 게재됐다.
연구팀은 두 유연 추진체가 단순히 개별적으로 움직이는 것이 아니라, 위상차(phase difference)*에 따라 서로 영향을 주고받으며 더 효율적으로 추진한다는 사실을 확인했다.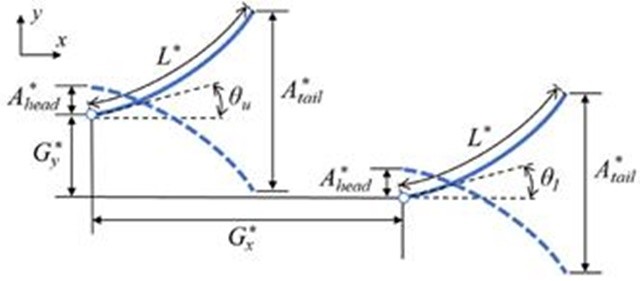
특히, 특정 조건에서는 후행 추진체가 선행 추진체가 만든 와류를 활용해 에너지 소모는 줄이고 추진력은 높일 수 있음을 입증했으며, 추진체의 유연한 형태 변화가 유동 안정성과 효율 향상에 중요한 역할을 한다는 점도 밝혀냈다.
이번 연구는 단일 추진체 위주로 진행되던 기존 연구를 넘어, 여러 추진체가 함께 움직일 때 나타나는 에너지 절감 및 성능 최적화 메커니즘을 수치적이고 과학적으로 입증했다는 점에서 의미가 크다.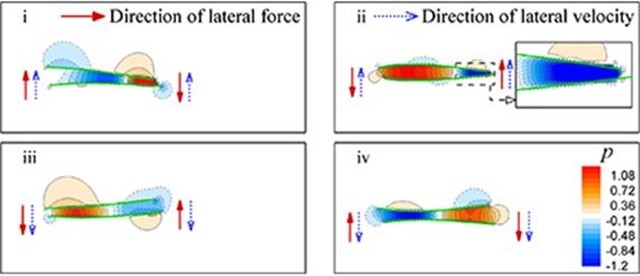
이는 향후 자율형 수중로봇, 해양 드론, 지능형 수중 센서 네트워크 등 다양한 응용 분야에 기초 이론을 제공하며, 집단 군집 지능을 활용한 차세대 추진 시스템 설계로 이어질 수 있다.
정영달 교수는 “이번 연구는 국내 연구자가 글로벌 연구진과 함께 수중 추진 분야의 주요 과제를 탐구하고 해결 방안을 제시했다는 점에서 큰 의미가 있다”며, “향후 생체모방 공학과 차세대 로봇 추진 기술 발전의 가능성을 넓히는 계기가 될 것”이라고 강조했다.
한편, 이번 논문은 조선대학교와 존스홉킨스대학교가 협력한 국제 공동연구 성과이며, 한국연구재단 개인기초연구사업(RS-2024-00355541)의 지원을 받아 수행됐다.

